Journal
[12] H. Gao, X. Yang, X. Xiao, X. Zhu, T. Zhang, C. Hou, H. Liu, Max Q.-H. Meng, L. Sun, X. Zuo, Y. Li and H. Ren, “Transendoscopic Flexible Parallel Continuum Robotic Mechanism for Bimanual Endoscopic Submucosal Dissection,” The International Journal of Robotics Research (IJRR, JCR-Q1, IF: 7.5), 2023.
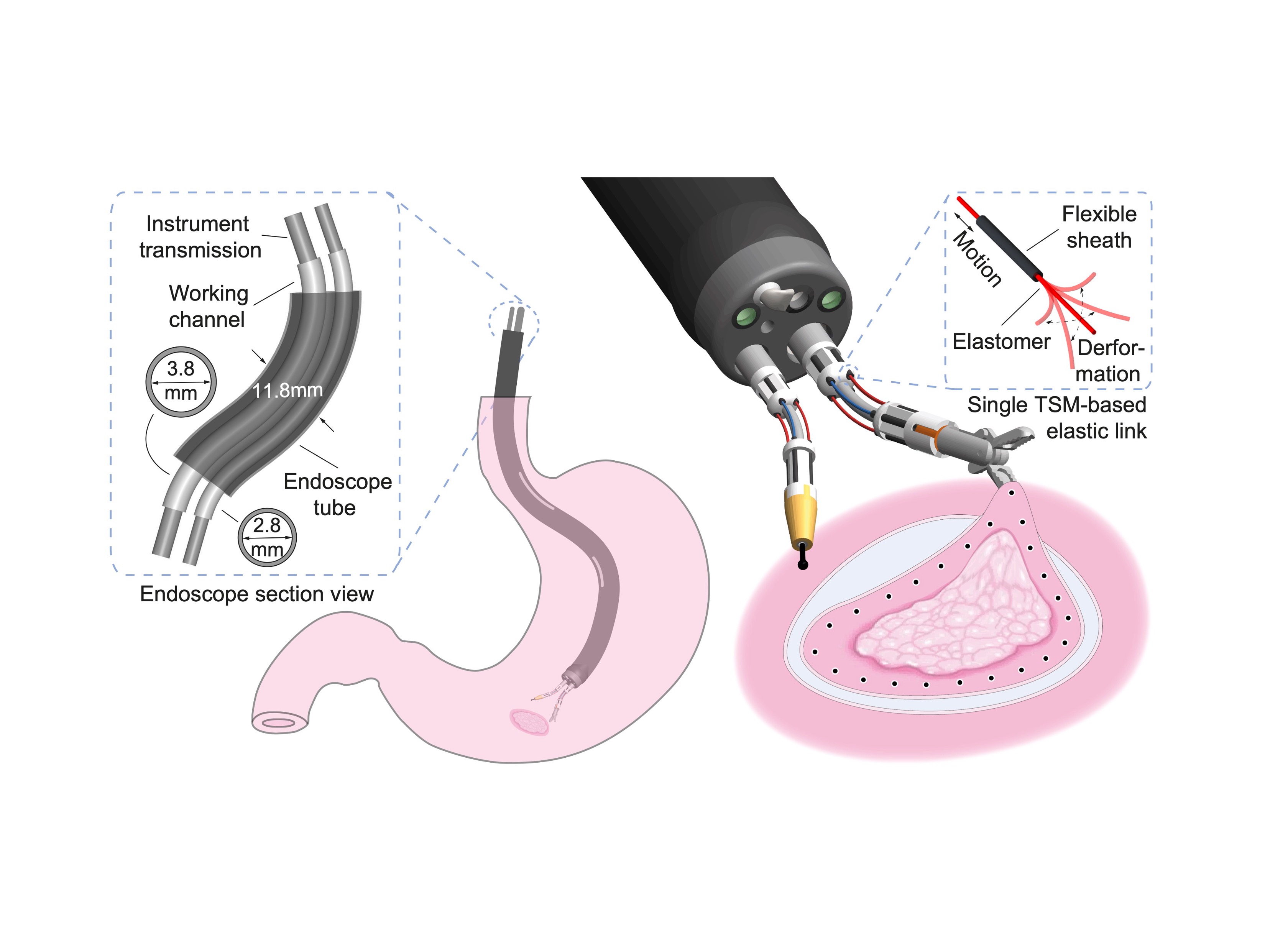
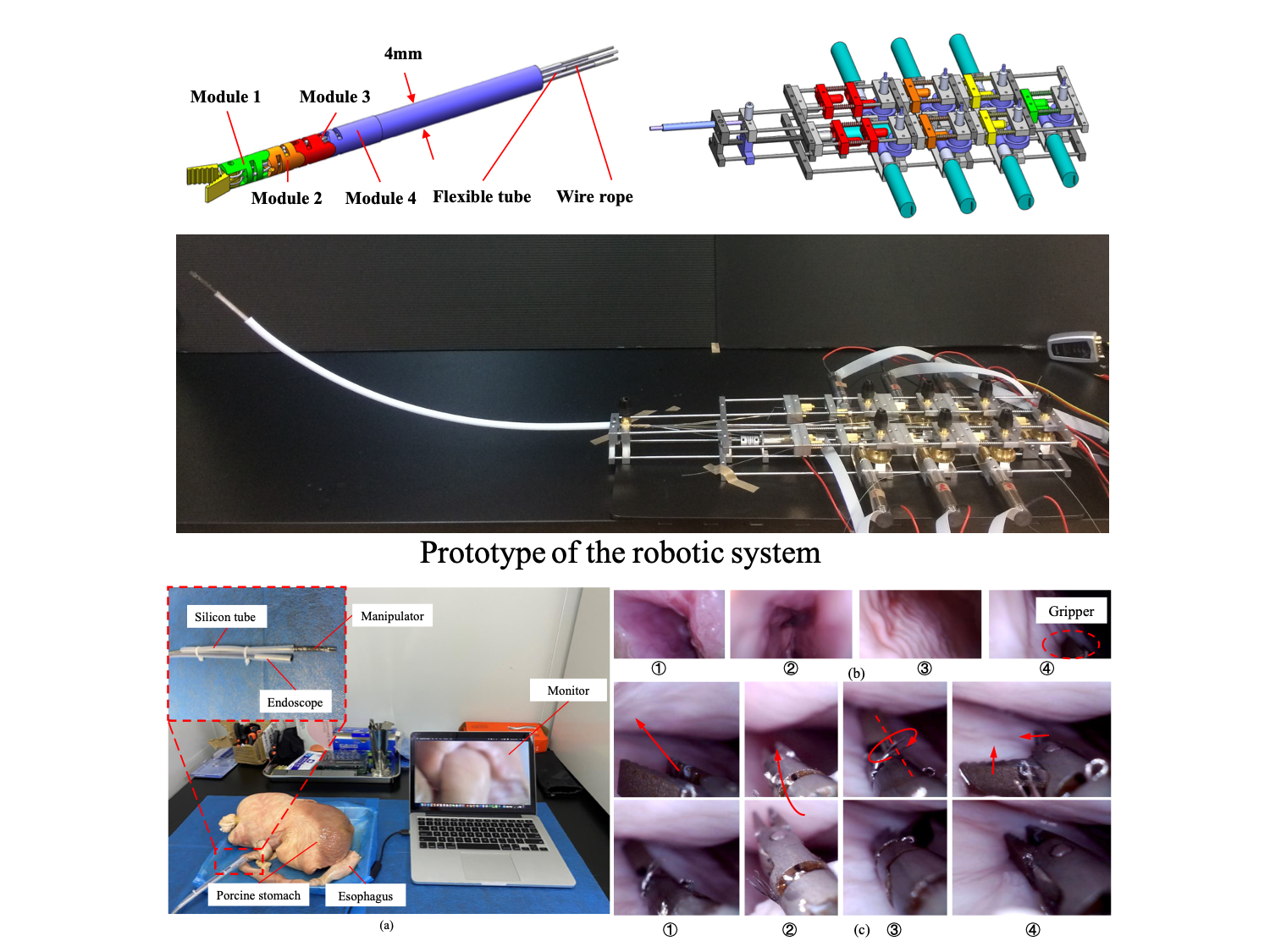
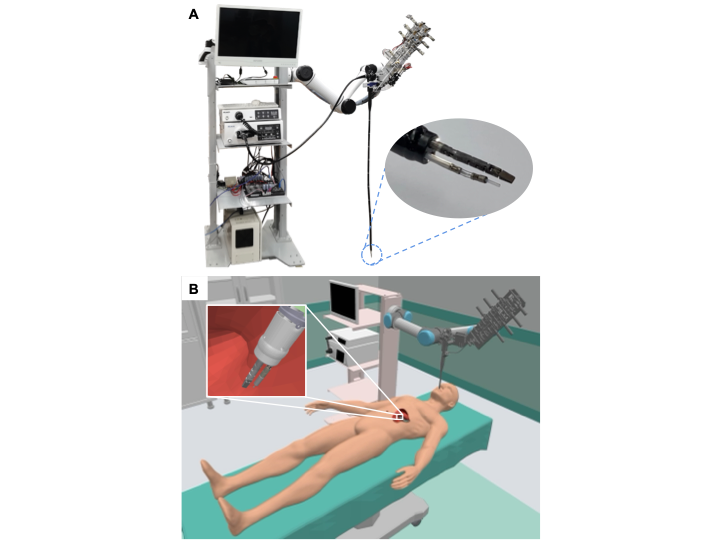
In this work, we propose the first Transendoscopic Flexible Parallel Continuum Robotic mechanism to develop a miniature dexterous flexible-stiff-balanced Wrist (FPCW). Besides, it can steer multifunctional instruments, including the electrosurgical knife, injection needle, and forceps. Furthermore, we develop a surgical telerobotic system, called DREAMS. Finally, we validate DREAMS through ex-vivo and in-vivo bimanual ESD study.

[11] X. Yang, H. Gao, S. Fu, R. Ji, C. Hou, H. Liu, N. Luan, H. Ren, L. Sun, J. Yang, Z. Zhou, X. Yang, L. Sun, Y. Li, and X. Zuo, “A novel miniature transendoscopic telerobotic system for endoscopic submucosal dissection,” Gastrointestinal Endoscopy (GIE, JCR-Q1, IF: 6.7), 2023.
We developed a novel transendoscopic telerobotic system, named DREAMS. The safety profile and technical feasibility of ESD were significantly improved with the assistance of the DREAMS system, especially in the narrower esophageal lumen.
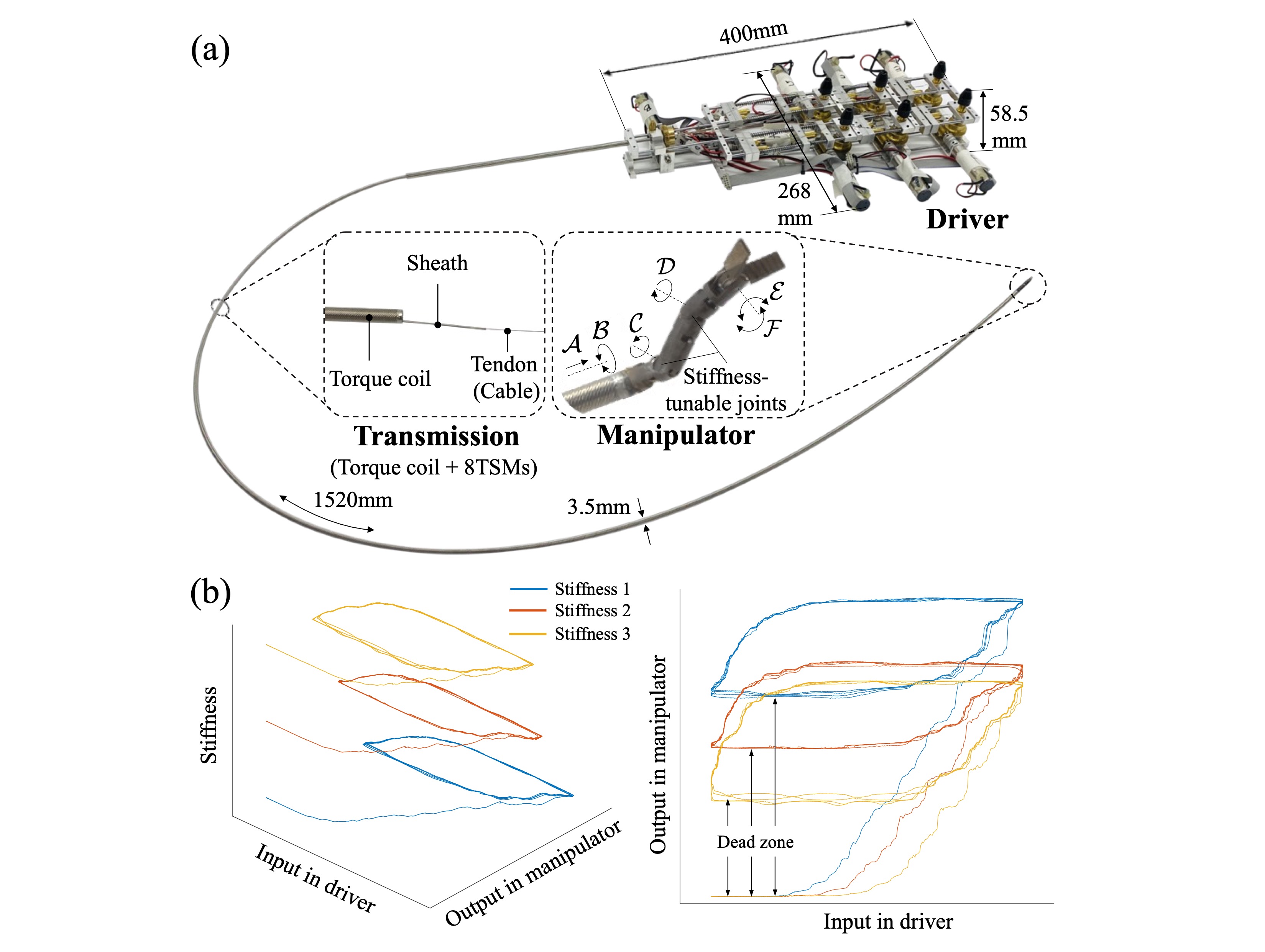
[10] H. Gao, R. Hao, X. Yang, C. Li, Z. Zhang, X. Zuo, Y. Li and H. Ren, “Modeling and compensation of stiffness-dependent hysteresis for stiffness-tunable tendon-sheath mechanism in flexible endoscopic robots,” IEEE Transactions on Industrial Electronics (TIE, JCR-Q1, IF: 7.5), 2023.
In this work, we propose the first stiffness-dependent hysteresis model based on the modified generalized Prandtl-Ishlinski (MGPI) model for our developed tendon-sheath mechanism-based stiffness-tunable miniature manipulators (STMM). Then, a compensation strategy was developed for the STMM’s control using the inverse stiffness-dependent MGPI model.
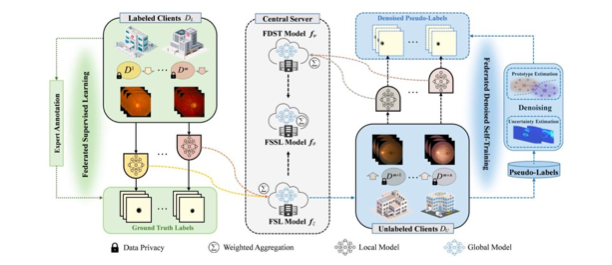
[9] L. Qiu, J. Cheng, H. Gao, W. Xiong, and H. Ren, “Federated semi-supervised learning for medical image segmentation via pseudo-label denoising,” IEEE Journal of Biomedical and Health Informatics (JBHI,JCR-Q1, IF: 6.7), 2023.
In this work, I help conduct experiments to verify the proposed FSSL model and modify the manuscript.
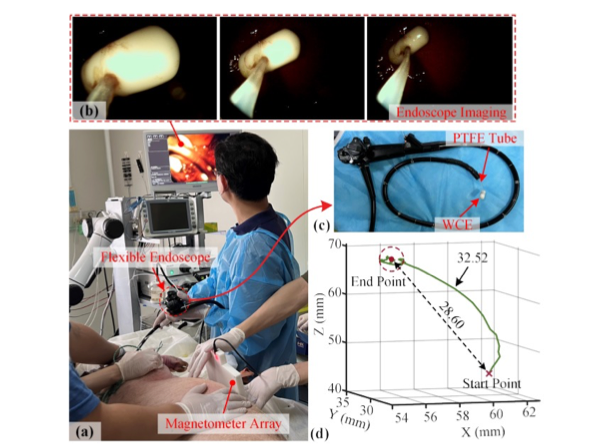
[8] S. Su, S. Yuan, M. Xu, H. Gao, X. Yang, and H. Ren, “AMagPoseNet: Real-time 6-DoF magnet pose estimation by dual-domain few-shot learning from prior model,” IEEE Transactions on Industrial Informatics (TII, JCR-Q1, IF: 11.7), 2023.
In this work, I was in charge of the animal study. I used the developed magnetometer array to localize the wireless capsule endoscope (WCE) inside a porcine model and collected the ground truth of WCE’s displacement. The result shows the AMagPoseNet has high prediction accuracy of WCE’s pose.
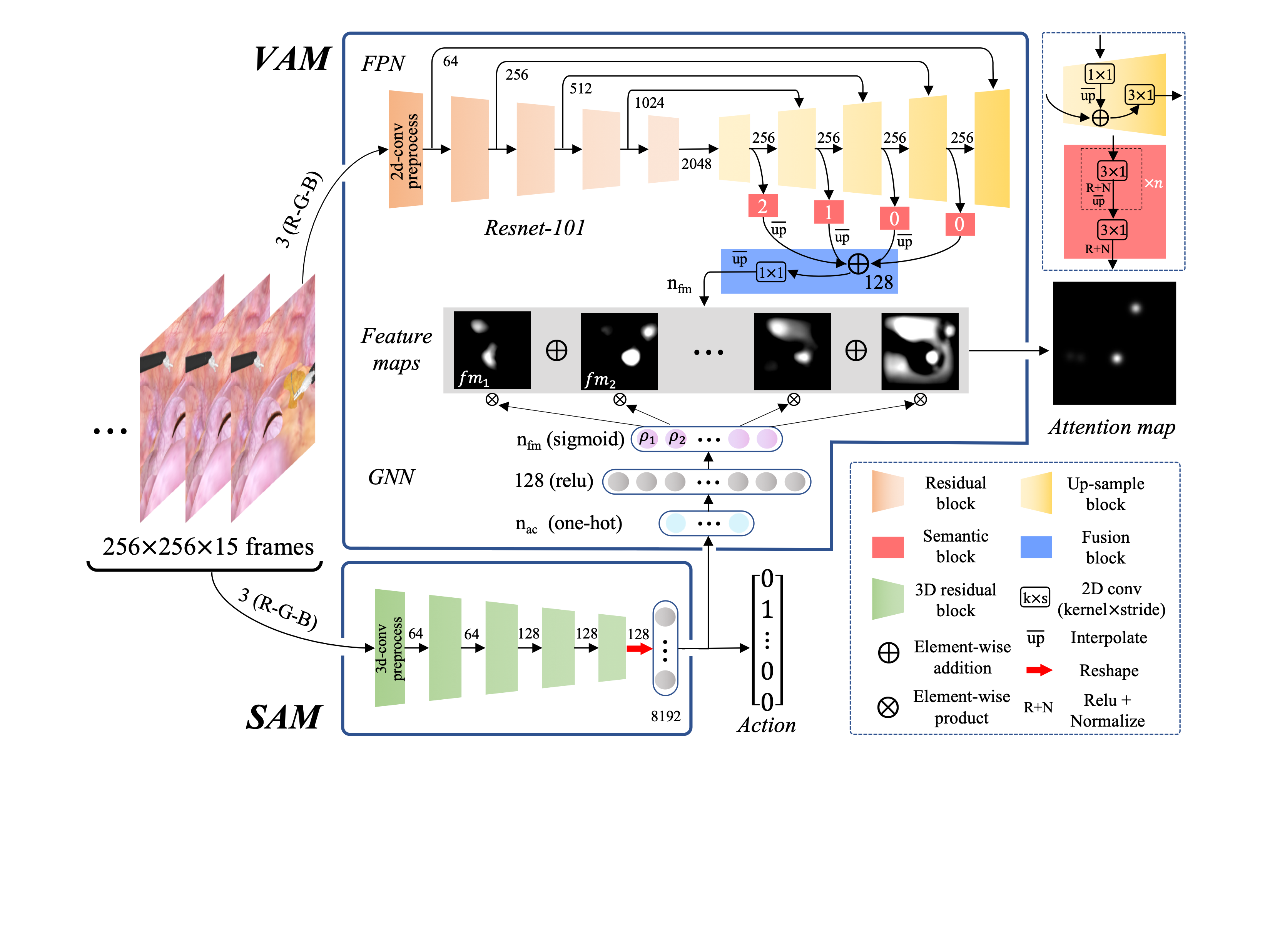
[7] H. Gao*, W. Fan*, L. Qiu, X. Yang, Z. Li, X. Zuo, Y. Li, M.Q.Meng and H. Ren, “SAVAnet: Surgical action-driven visual attention network for autonomous endoscope control,” IEEE Transactions on Automation Science & Engineering (T-ASE, JCR-Q1, IF: 5.9), 2022.
In this work, we learnt from the surgeons’ visual attention mechanism and propose a novel network called SAVAnet to predict visual attention with action guidance. Additionally, we implemented the SAVAnet on a da Vinci simulator to execute the autonomous endoscope control.

[6] X. Yang, H. Gao, J. Chen, C. Hou, Z. Zhou, R. Ji, H. Liu, H. Ren, Li. Sun, X. Yang, Y. Li and X. Zuo, “Development and primary evaluation of a digestive endoscopy minimally invasive surgical robot system in endoscopic submucosal dissection: an ex vivo, feasibility study,” Chinese Journal of Digestive Endoscopy, 2022.
In this work, we preliminarily evaluate the dissection effect, safety and performance of the endoscopic robot system for endoscopic submucosal dissection (ESD) in ex-vivo porcine gastric.
Accepted
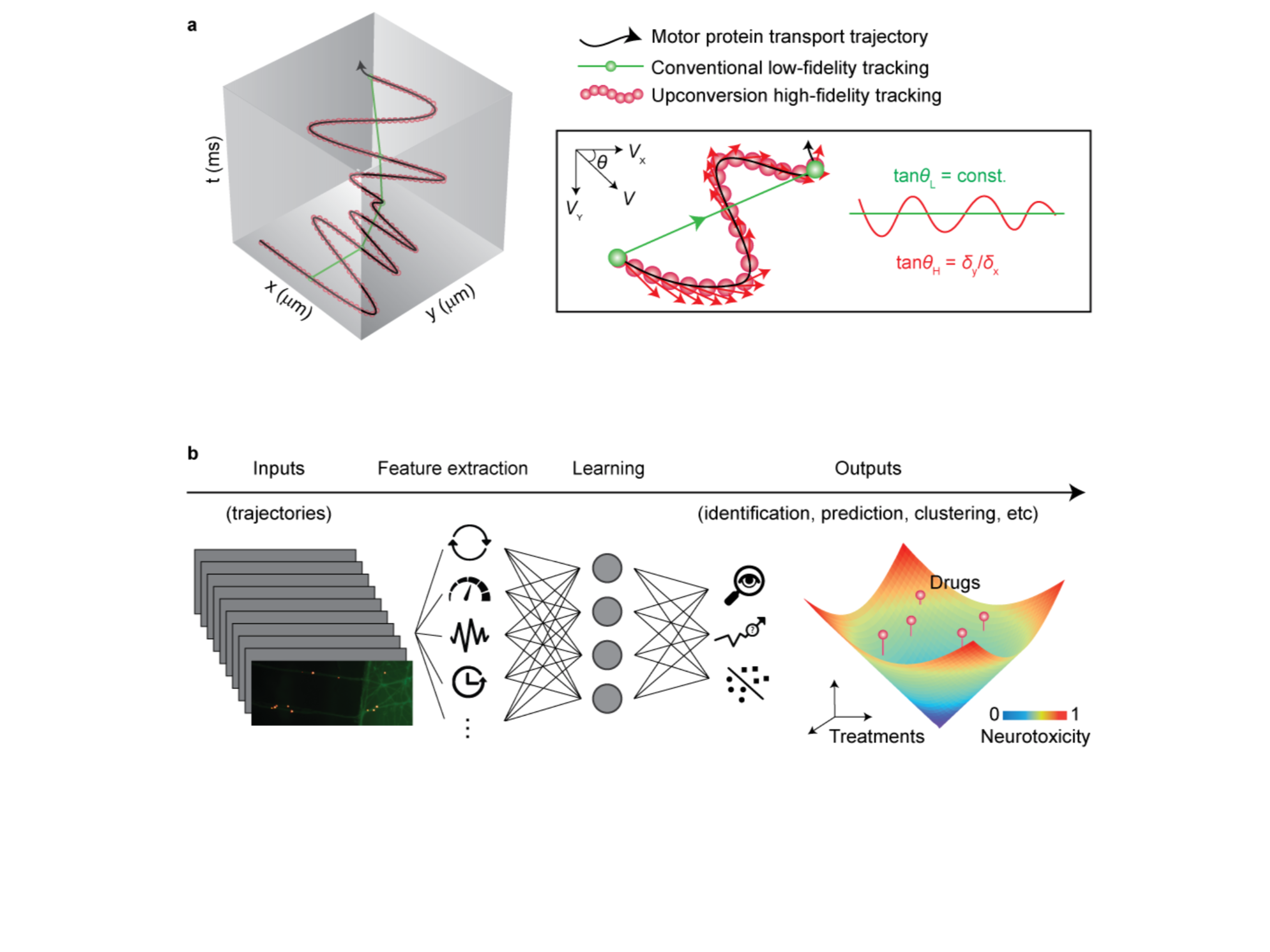
[5] Z. Yi, H. Gao, X. Ji, S.Y. Chong, Y. Mao, B. Luo, C. Shen, S. Han, J.W. Wang, S. Jung, P. Shi, H. Ren and X. Liu, “Mapping drug-induced neuropathy through in-situ motor protein tracking and machine learning,” Journal of the American Chemical Society (IF: 14.612, JCR-Q1, IF: 14.4), 2021.
In this work, we report dynamic near-infrared upconversion imaging and prove that combining the upconverting nanoplatform with machine learning offers a powerful tool for mapping chemotherapy-induced peripheral neuropathy and assessing drug-induced neurotoxicity.
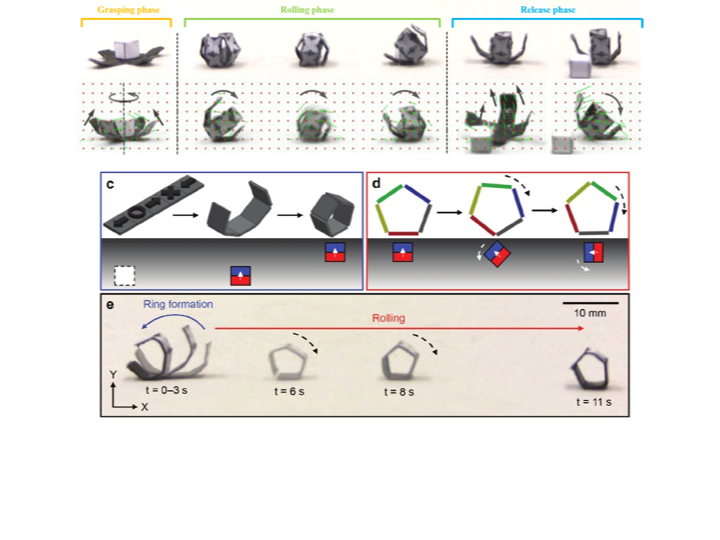
[4] B.S. Yeow, H. Yang, M.S. Kalairaj, H. Gao, C.J. Cai, S. Xu, P. Chen and H. Ren, “Magnetically Steerable Serial and Parallel Structures by Mold-Free Origami Templating and Domain Setting,” Advanced Materials Technologies (JCR-Q1, IF: 6.4), 2021.
In this work, I was in charge of tracking origami motions using optical flow. The developed origami robot “Terapod crawler” can grasp small targets by magnetic actuation.
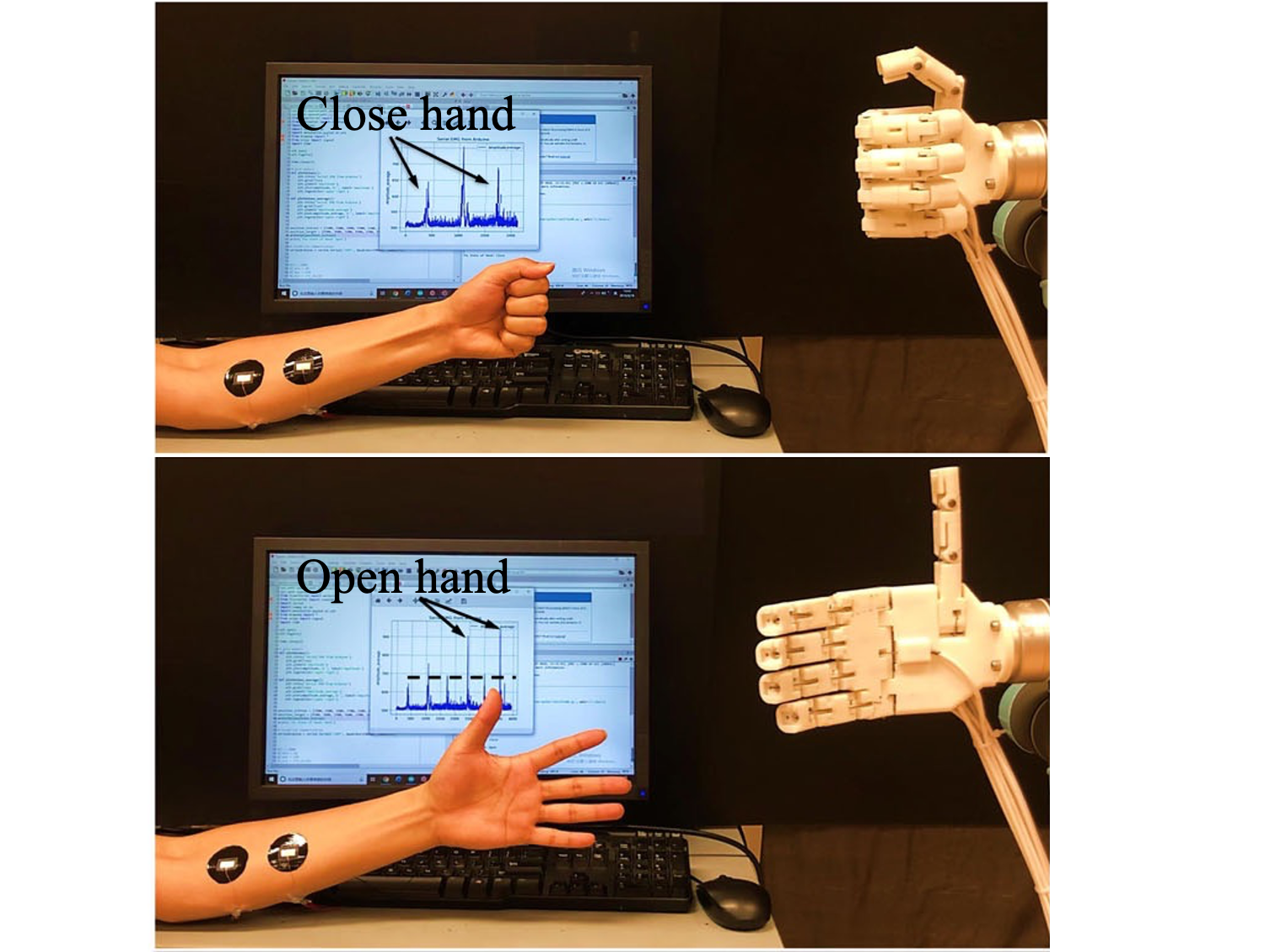
[3] L. Zhang, K.S. Kumar, H. Hao, C. J. Cai, H. He, H. Gao, S. Yue, C. Li, R.C. Seet, H. Ren and J. Ouyang, “Fully organic compliant dry electrodes self-adhesive to skin for long-term motion-robust epidermal biopotential monitoring,” Nature Communication (NC, JCR-Q1, IF: 14.7), 2020.
In this work, I was in charge of the EMG-based control of a robotic hand. The EEG signal from human arm is sampled by the designed sensor, collected to the PC by Arduino in real time to control the robotic hand: open and close. The test validates the perceptive performance of the sensor.
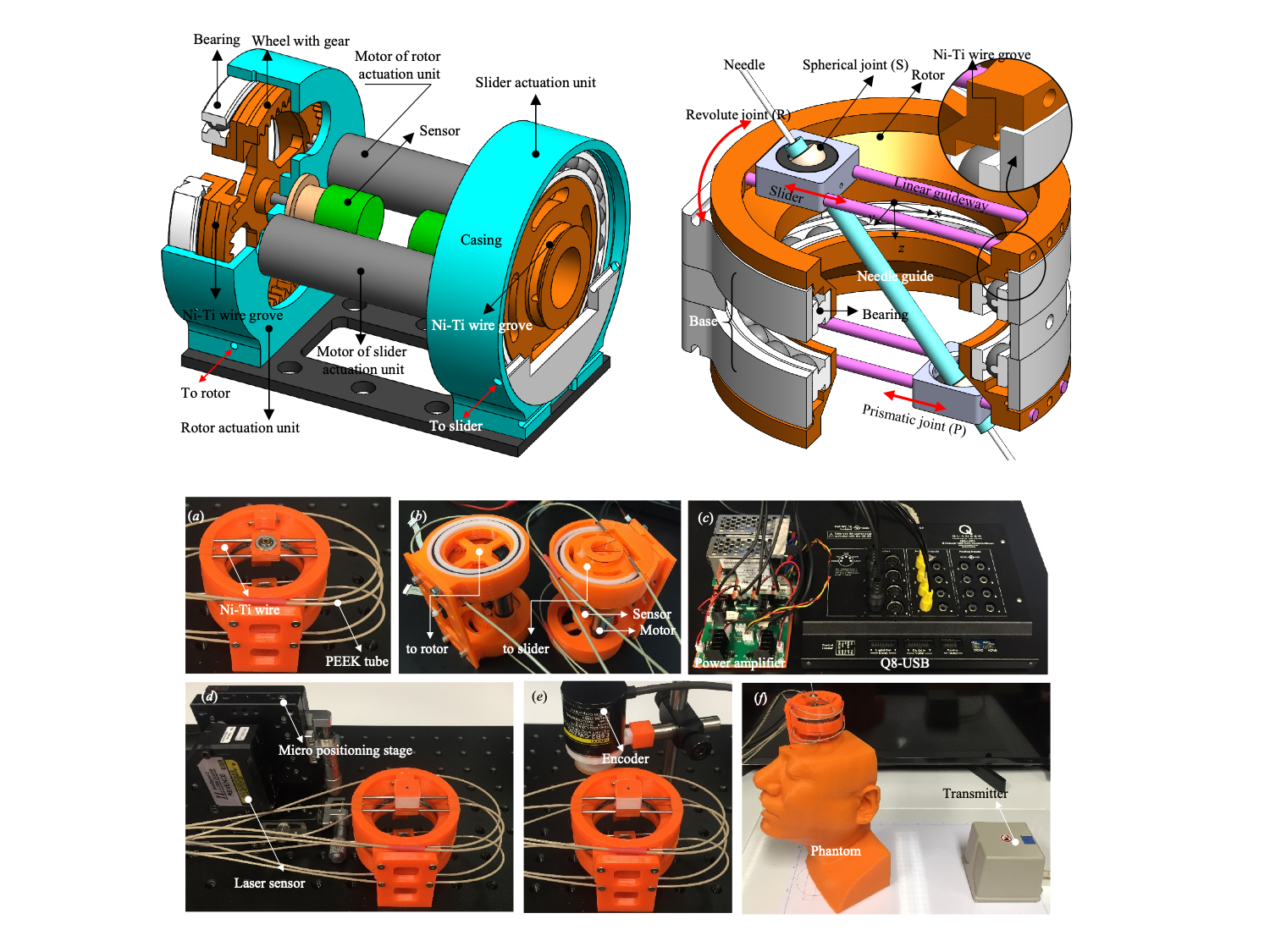
[2] X. Xiao, H. Gao, C. Li, L. Qiu, K. S. Kumar, C. J. Cai, B. S. Bhola, N. K. K. King and H. Ren, “Portable body-attached positioning mechanism towards robotic needle intervention,” IEEE/ASME Transactions on Mechatronics (TMECH, JCR-Q1, IF: 6.1), vol. 25, pp. 1105–1116, April 2020.
We proposed a novel skull-mounted robot, which has the following features: cable-driven, MRI-compatible, 4 DOFs, and parallel structure with RCM mechanism. The open-loop positioning accuracy is within ±1 mm and −0.8° to 1.5°.
[1] C. Li, Y. Yan, X. Xiao, X. Gu, H. Gao, X. Duan, X. Zuo, Y. Li and H. Ren, “A miniature manipulator with variable stiffness towards minimally invasive transluminal endoscopic surgery,” IEEE Robotics and Automation Letters (JCR-Q1, IF: 4.6), 2021.
In this work, I was in charge of the ex-vivo test. The experimental results show that the designed flexible manipulator can finish different motion smoothly inside porcine stomach.
Additionally, I made the presentation for this paper in ICRA2021.
Paper | Video (Bilibili or YouTube) | Presentation (Bilibili or YouTube)
Conference
[3] H. Gao*, Z. Zhang*, C. Li, X. Xiao, L. Qiu, X. Yang, R. Hao, X. Zuo, Y. Li and H. Ren, “GESRsim: gastrointestinal endoscopic surgical robot simulator,” in 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
In this work, we use CoppeliaSim to develop the first robotic simulator for the GESR system (GESRsim) based on our robotic prototype. The GESRsim provides several 3D models and kinematics of the manipulators and endoscopic snake bone, and scenes for robotic GES training. Besides, we performed teleoperation and implemented advanced control algorithms.
Accepted
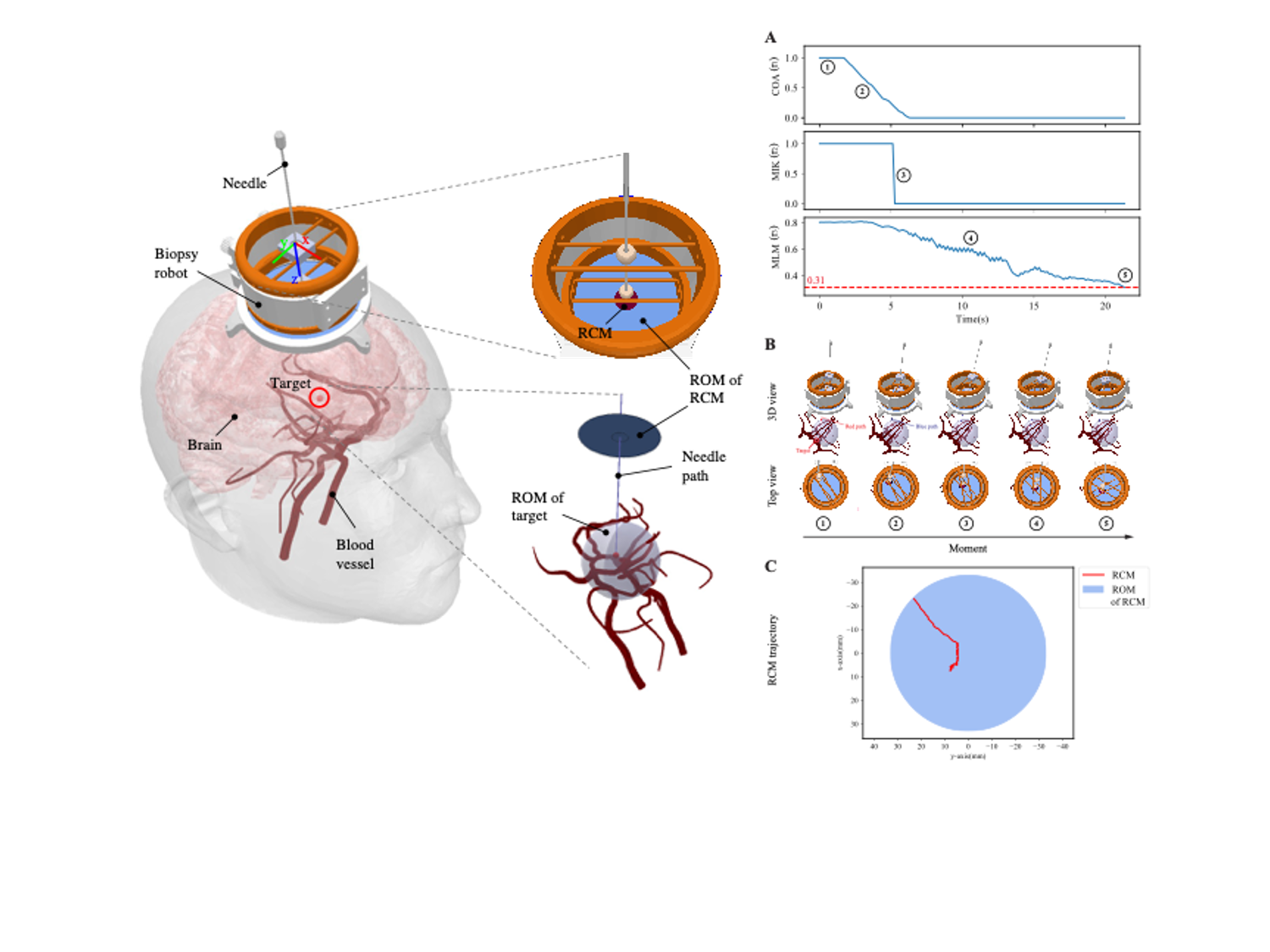
[2] H. Gao, X. Xiao, L. Qiu, M.Q. Meng, N.K.K. King and H. Ren, “Remote-center-of-motion recommendation toward brain needle intervention using deep reinforcement learning,” in 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021.
We proposed to use DRL to recommend an optimal RCM (burr hole or insertion point). In this work, a needle intervention scene is constructed in Vrep for the interaction with RL agent. Additionally, the needle intervention for our designed robot needs to satisfied three defined criteria: one clinical requirements (COA) and two mechanical requirements (MIK, MLM). A reward function is designed to combine the above criteria.
[1] X. Xiao, S. Xu, C. Li, X. Gu, H Gao, M.Q.Meng and H. Ren, “Magnetically-connected modular reconfigurable mini-robotic system with bilateral isokinematic mapping and fast on-site assembly towards minimally invasive procedures,” in 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021.
In this work, I was in charge of robotic simulation and assisting in some experiments.
Workshop
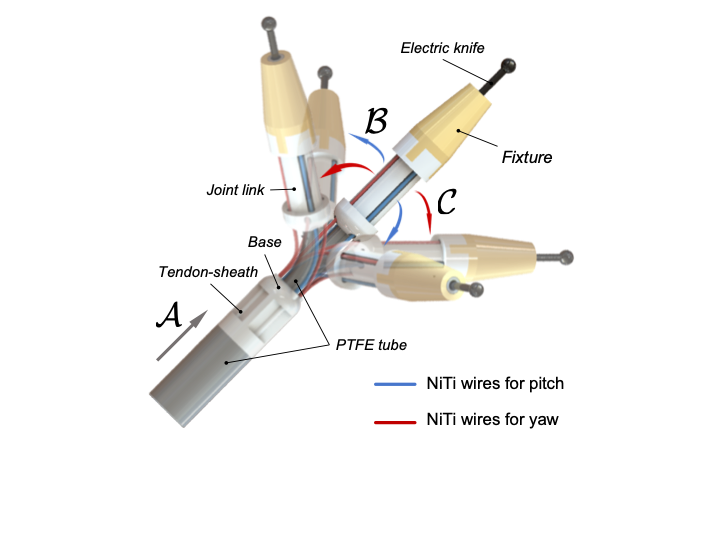
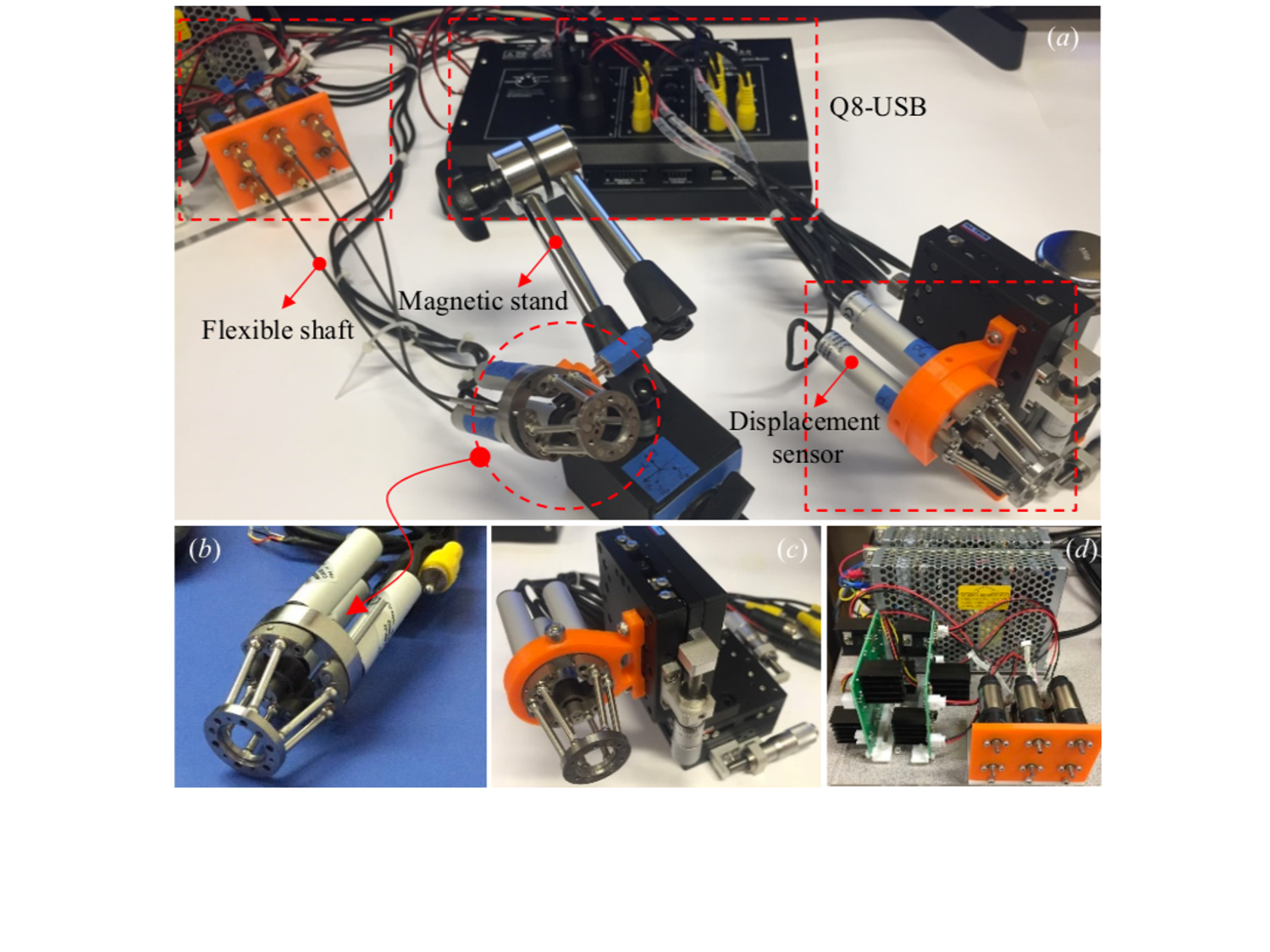
[1] H Gao, X. Xiao, X. Yang, T. Zhang, X. Zuo, Y. Li and H. Ren, “A miniature 3-DoF flexible parallel robotic wrist using NiTi wires for gastrointestinal endoscopic surgery,” in 2022 IEEE International Conference on Robotics and Automation (ICRA) workshop – Frontiers of Endoluminal Intervention: Clinical opportunities and technical challenges, 2022.
In this work, we propose a miniature 3-DoF flexible parallel robotic wrist. Additionally, we validate the performance in an ex-vivo test.
Patent
[3] A measuring device and a measuring method to positioning repeatability and dynamic response for the miniature robotic arm. (Chinese patent, filed)
[2] A scoring method and a scoring device of fully automatic abdominal wall withdrawal reflex. (Chinese patent, filed)
[1] A soft robot and control strategy for the movement of the concentric tubes. (Chinese patent, filed)